Project Overview
This was the final capstone project for The Construct Robotics Masterclass, designed to solve a real-world automation challenge: creating a fully automated coffee delivery system. The project integrated multiple robotics and AI disciplines to build an end-to-end system where a robotic arm can visually identify a designated delivery slot, pick up a coffee cup, and place it accurately and securely without spilling.
The system demonstrates the practical application of computer vision, motion planning, and robotic manipulation - combining perception, planning, and control to achieve a complex automated task.
My Role
I was responsible for the entire development lifecycle, from system architecture and design to implementation and deployment. This included:
- Designing the overall system architecture integrating vision, planning, and control
- Training and deploying the YOLOv8 perception model for real-time object detection
- Implementing motion planning using the MoveIt! framework
- Developing custom ROS nodes to orchestrate the entire workflow
- Programming and controlling the UR3e robotic arm for precise execution
Key Features & Technical Implementation
Real-Time Perception (YOLOv8)
Trained a YOLOv8 computer vision model for real-time detection of the designated delivery slot ("hole") for cup placement. The system accurately identifies the target's 3D coordinates from the camera feed, enabling precise spatial awareness for the robotic arm.
Precision Motion Planning (MoveIt!)
Implemented the MoveIt! framework to handle all motion planning tasks. This enabled the generation of smooth, collision-free Cartesian paths, ensuring the UR3e arm moved precisely and safely from the pick location to the place location without spilling the coffee.
Full ROS Integration
The entire system was orchestrated using ROS (Robot Operating System). Custom nodes were developed to subscribe to YOLOv8 perception topics, process the 3D coordinates, send goals to the MoveIt! planner, and execute the planned trajectory on the physical UR3e robotic arm.
End-to-End Automation
Achieved fully autonomous operation from perception to execution. The system detects the target, plans the motion, picks up the coffee cup, navigates to the delivery slot, and places it accurately - all without human intervention.
Technologies Used
Project Demo
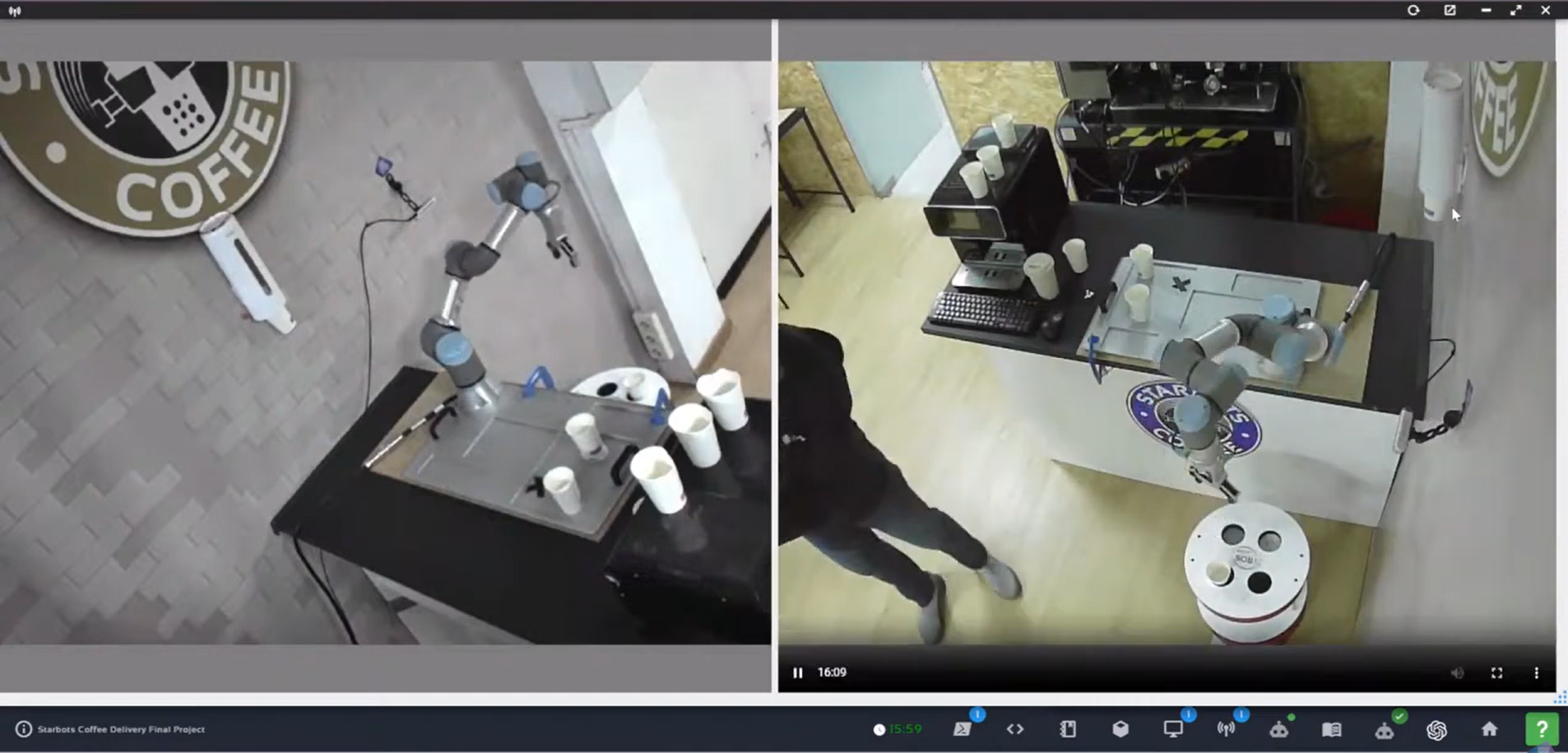
UR3e robotic arm with YOLOv8 vision system for autonomous coffee cup placement
Impact & Learning Outcomes
This capstone project successfully demonstrated the integration of advanced robotics concepts including computer vision, motion planning, and robotic manipulation. The system showcased practical application of AI and robotics in solving real-world automation challenges, validating the skills acquired throughout the Robotics Masterclass.