Project Overview
This checkpoint project involved developing an autonomous navigation system for the ROSbot XL, a holonomic four-wheeled robot, using PID (Proportional-Integral-Derivative) control for precise movement adjustments. The challenge was to program the robot to navigate through a complex maze environment while detecting obstacles and dynamically adjusting its path.
The system demonstrates advanced control theory application in robotics, combining sensor-based perception with feedback control to achieve smooth, accurate navigation in constrained spaces.
My Role
I developed and tuned the complete navigation control system, including:
- Implementing PID control algorithms for velocity and heading control
- Tuning PID parameters (Kp, Ki, Kd) for optimal performance
- Integrating vision-based obstacle detection using camera sensors
- Programming dynamic speed and direction adjustments based on environment
- Testing and validating navigation through complex maze scenarios
Key Features & Implementation
PID Control System
Implemented a sophisticated PID controller that continuously adjusts the robot's velocity and heading based on sensor feedback. The controller calculates error values between desired and actual states, providing smooth and precise movement through proportional, integral, and derivative terms.
Vision-Based Obstacle Detection
Integrated camera-based perception to detect obstacles and walls in real-time. The vision system processes camera feeds to identify potential collisions and provides critical feedback to the navigation algorithm for obstacle avoidance.
Dynamic Path Adjustment
Programmed the robot to dynamically adjust its speed and direction based on the detected environment. The system slows down near obstacles, speeds up in open areas, and smoothly navigates turns using the holonomic drive capabilities.
Maze Navigation
Successfully programmed autonomous navigation through a complex maze environment, demonstrating the robot's ability to handle tight corners, narrow passages, and varied obstacle configurations while maintaining stable control.
Technologies Used
Maze Navigation Demonstration
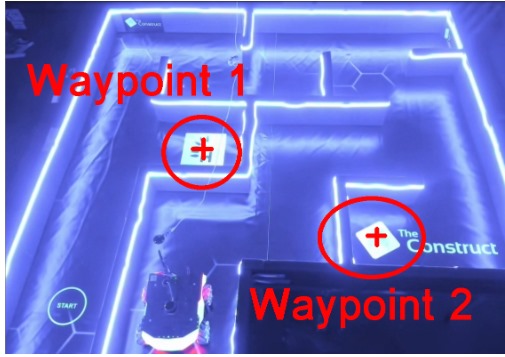
ROSbot XL navigating through maze using PID control and vision-based obstacle detection
Impact & Learning Outcomes
This project provided hands-on experience with fundamental control theory concepts applied to real robotic systems:
- Deep understanding of PID control theory and parameter tuning
- Integration of vision systems for real-time environment perception
- Programming holonomic drive systems for omnidirectional movement
- Developing robust navigation algorithms for constrained environments