نظرة عامة على المشروع
تمحور هذا المشروع المرحلي حول تطوير نظام ملاحة ذاتية لروبوت ROSbot XL، وهو روبوت هولونومي ذو أربع عجلات، باستخدام تحكم PID (التناسبي-التكاملي-التفاضلي) لإجراء تصحيحات دقيقة ومستمرة في الحركة. وكان التحدي هو برمجة الروبوت للتنقل داخل بيئة متاهة معقدة مع كشف العوائق والتكيف مع المسار بشكل ديناميكي.
يوضح هذا النظام تطبيقاً عملياً متقدماً لنظرية التحكم في الروبوتات، من خلال دمج الإدراك القائم على الحساسات مع التحكم بالتغذية الراجعة لتحقيق ملاحة سلسة ودقيقة داخل المساحات الضيقة.
دوري
قمت بتطوير وضبط نظام التحكم الكامل للملاحة، وشمل ذلك:
- تنفيذ خوارزميات تحكم PID للتحكم في السرعة والاتجاه
- ضبط معاملات PID (Kp وKi وKd) للوصول إلى أفضل أداء
- دمج كشف العوائق القائم على الرؤية باستخدام حساسات الكاميرا
- برمجة تعديلات ديناميكية للسرعة والاتجاه بناءً على البيئة المحيطة
- اختبار النظام والتحقق من نجاح الملاحة داخل سيناريوهات متاهة معقدة
الميزات الرئيسية والتنفيذ
نظام التحكم PID
نفذت متحكماً متقدماً من نوع PID يقوم بتعديل سرعة الروبوت واتجاهه بشكل مستمر اعتماداً على التغذية الراجعة من الحساسات. ويحسب المتحكم قيم الخطأ بين الحالة المطلوبة والحالة الفعلية، مما يحقق حركة ناعمة ودقيقة عبر الحدود التناسبية والتكاملية والتفاضلية.
كشف العوائق بالرؤية الحاسوبية
قمت بدمج إدراك قائم على الكاميرا لاكتشاف العوائق والجدران في الوقت الحقيقي. يعالج نظام الرؤية بث الكاميرا لتحديد احتمالات الاصطدام ويوفر تغذية راجعة مهمة لخوارزمية الملاحة من أجل تجنب العوائق بفعالية.
تعديل المسار بشكل ديناميكي
تمت برمجة الروبوت ليعدل سرعته واتجاهه بصورة ديناميكية وفق البيئة المكتشفة. يبطئ قرب العوائق، ويتسارع في المناطق المفتوحة، وينفذ المنعطفات بسلاسة مستفيداً من قدرات القيادة الهولونومية.
الملاحة داخل المتاهة
نجح النظام في تنفيذ ملاحة ذاتية داخل متاهة معقدة، موضحاً قدرة الروبوت على التعامل مع الزوايا الضيقة والممرات المحدودة وتوزيعات العوائق المختلفة مع الحفاظ على ثبات التحكم.
التقنيات المستخدمة
عرض الملاحة داخل المتاهة
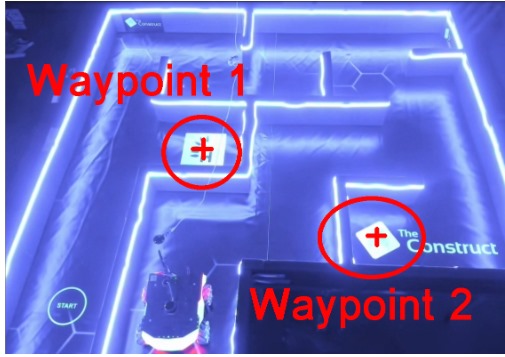
روبوت ROSbot XL يتنقل داخل المتاهة باستخدام تحكم PID وكشف العوائق بالرؤية
الأثر ومخرجات التعلم
منحني هذا المشروع خبرة عملية مباشرة في مفاهيم التحكم الأساسية المطبقة على الأنظمة الروبوتية الحقيقية:
- فهم عميق لنظرية تحكم PID وكيفية ضبط معاملاتها
- دمج أنظمة الرؤية لتحقيق إدراك لحظي للبيئة
- برمجة أنظمة قيادة هولونومية للحركة متعددة الاتجاهات
- تطوير خوارزميات ملاحة قوية للبيئات المقيدة والمعقدة